Convolution published: 25th March 2025
Intro
Let's talk systems. You hear people talk about systems and how complex
some systems are. Systems surround us in every aspect if life. Think
about economy, it consists of entities interacting with each other and
producing some output i.e. economic activity which affects all our
lives. It consists of consumers, businesses, governments, and
resources interacting through countless transactions. A car is a
system which consists of smaller systems interacting with each other
and producing not just one but multiple outputs. It integrates
mechanical, electrical, and computational subsystems that collectively
provide transportation. For example when you press the car pedal these
interacting smaller systems produce velocity which moves the car. In
terms of audio processing a filter is a system which takes in an input
and filters out a part of that given output. You'd not want your
filter to be unstable and modify the input signal in an inconsistent
manner. So how do you make sure when designing such systems that they
produce the same output given the same input now or later. The
challenge across all these domains is ensuring consistency and
predictability that a system will behave the same way given the same
inputs regardless of when or how it's operated.
A system can be defined as a set of
interconnected components that work together to achieve specific
outcomes. In terms of DSP a system can be defined as any process that
produces an output signal in response to an input signal. A
signal describes how one parameter varies
with another parameter. For example an analog signal in DSP is voltage
changing over time. Systems and signals can be discrete or continuous.
Mathematically continuous signals use parentheses: x(t), y(t) while
discrete signals use brackets: x[t], y[t]. Also, signals use lowercase
letters. The name given to a signal usually describes the parameters
of the signal, eg. v(t) is voltage over time.
System Properties
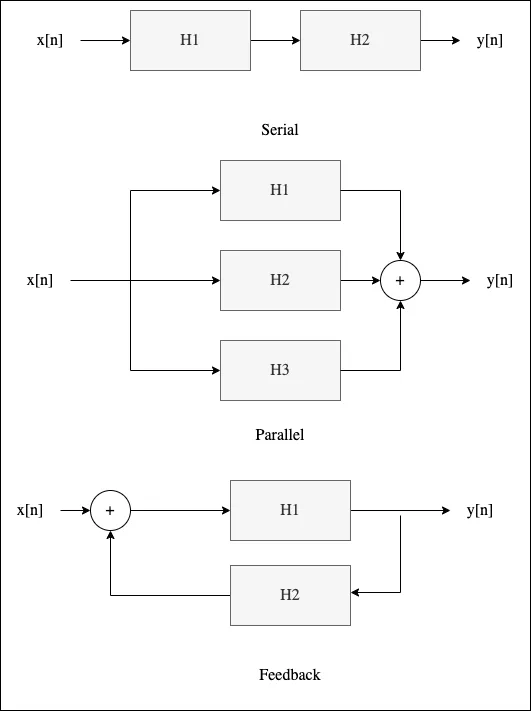
Let's take the car pedal as an example. The pressure you apply to the pedal translates to the velocity produced by the system. So, p(t) -> system -> v(t) i.e. velocity. Or let's take a different kind of system as example which is outside the engineering domain such as price of petrol on a day. The price of a barrel of oil which goes into a system like economy and what you get is the price of a litre of petrol. o[n] -> system -> p[n]. Mathematically a system is denoted by H so p[n] = H(o[n]). In real life there is seldom a simple system consisting of just one unit, usually multiple subsystems are connected to each other in serial, parallel feedback fashion. A cruise control in cars is a good example of a feedback system.
Such systems have certain properties that we need to understand in
order to study them and first one of the properties is
causality. A system is causal if the
output at time n only depends on the input up to time n.
y[n] = x[n] - 3x[n-1]
This system seems causal and to check if it causal or not we can check
if the output depends on a future value. For eg.
y[n] = x[n+2] is not causal as it depends on a future value that we
don't have yet.
This one sounds to be pretty obvious. Your car doesn't know how you're
going to interact with it. The car will only react when you interact
with it making it a causal system. But we also see many non-causal
systems in real life. Systems in pattern recognition, image
processing, etc. are non-causal. If you want to blur a part of the
image you take all the surrounding pixel and average it out to
pixelate that part. If this was causal you'd only be allowed to access
pixels up to that part of the image and not the later ones for
averaging it out. A system being causal or not depends entirely on the
type of signal it's processing.
Studying systems is very crucial for DSP. For example, when you speak
on a phone you want your voice to resemble you on the other side. But
the input on the transmission line is different from the output on the
other side so in this case if you understand how the transmission line
(the system) works you can compensate for the unwanted effects on the
output signal. But where do we start this study? There are so many
systems out there in the world so it can take a lot of effort studying
each and every system. Well luckily given we are bound by physical
laws we can categorise such systems because of their intended
behaviour into something called as
linear systems which makes it easier
studying them. Linearity is the second property of systems. Let's
understand this property in detail.
Linearity
A system is linear if it satisfies these two mathematical properties:
homogeneity and
additivity. There is another property
called
shift invariance / time invariance which
is not a requirement for linearity but is a must for DSP domain. Let's
understand all 3 of these properties.
A system is homogeneous if change in the amplitude of the input
results in corresponding change in the amplitude of the output signal.
So if you multiply the input with a value to scale it the output
should also be scaled by that value. A resistor is a good example of a
homogeneous system. Any change in voltage v(t) across the resistor
will result in change of the current flowing through the resistor and
Ohm's law guarantees this. But if you think about it resistor is also
a non-homogeneous system if you look at the power dissipated by the
resistor. Since power is square of the voltage any change in the
voltage produces the power by a factor of 4 since p ∝
v2.
Let's say you have an input x1[n] which goes through a
system and gives y1[n]. Now you take another signal
x2[n] which gives an output of y2[n]. A system
is additive if the sum of the inputs produces sum of those individual
outputs. What this means is that the signals should pass through the
system without interacting. Think of this, when you're on a conference
call you can hear each person's voice as theirs if they are all
talking at the same time, you don't hear a new kind of voice which is
an amalgamation of the individual voices coming through the phone.
Both of the properties can be described in the following manner:
ax1[n] + bx2[n] -> system -> ay1[n] +
by2[n]
for any input x1, x2.
Shift or time invariance says the system behaves the same way
regardless of when the input is applied. A shift in the input signal
will result in the an identical shift in the output signal. If we add
a delay the signal by some value the output should also be delayed by
the same value.
x[n-n0] -> system -> y[n-n0]
Not all systems are time invariant. For example, the speed to download
a file at 3am is not the same as speed of download at 3pm. Internet
traffic is non time invariant. So why is additivity and homogeneity a
requirement for linearity but not time invariance? This is because
linearity is pretty broad and sometimes does not involve a signal. For
example, consider a shopkeeper who sells oranges for $2 per crate and
mangoes for $5 per crate. If the shopkeeper only sells oranges they
will receive $10 for 5 creates and $20 for 10 crates which makes the
exchange homogeneous. If they sell 20 creates of oranges and 10
creates of mangoes they will get $2 x 20 + $5 x 10 = $90 which is the
same amount as if the two had been solved individually making the
transaction additive. The transaction being both additive and
homogeneous makes it a linear process but since there are no signals
time invariance need not be satisfied for the process to be linear.
Superposition of LTI systems
Real world systems are modeled as Linear Time Invariant systems as
LTIs are often a good approximation and analysis is easy and powerful
of the corresponding real life system. When dealing with linear
systems the only way the signals can be combined is by
scaling which is multiplying tje signal
with a constant followed by addition.
A signal can't be multiplied by another signal.
Combining the signal through scaling and adding is called
synthesis. The inverse operation is called
decomposition.
Consider a signal x[n] passing through a system which produces output
y[n]. Here the input signal can be composed into a group of simpler
signals x1[n], x2[n], x3[n], etc.
which is called as input signal components. Now each component is
passed through the system resulting in output signal components
y1[n], y2[n], y3[n], etc. These
output signals can be synthesised to form the final output y[n]. This
is where things get interesting: the outout signal obtained by this
method is identical to the one produced by passing the inout signal
directly into the system. So instead of trying to understand how a
system behaves when given a complicated signal instead what we can do
is understand how it behaves if the signal is simplified into its
individual components. Here the input and output signals are
superposition i.e. sum of simpler signals. There are multiple ways to
achieve this understanding of a system by passing it a simple signal
and one of them is called impulse decomposition.
Impulse Decomposition
What you do in impulse decomposition is decompose the input signal into impulses. Ok, what are these impulses? An impulse is a signal composed of all zeros except a single non-zero point. Let's look at an example. If we have a 4 sample signal x[n] = {5, 3, 8, 2} the impulse decomposition would create 4 component signals:
- Component 1: {5, 0, 0, 0}
- Component 2: {0, 3, 0, 0}
- Component 3: {0, 0, 8, 0}
- Component 3: {0, 0, 0, 2}
Now you can pass these individual components to the system to
understand how the system behaves for one impulse and the
corresponding output produced by the system is called an impulse
response. Mathematically we use something called as a delta function
to make these signal components. It is denoted by δ[n] and is a
normalised impulse i.e. sample number zero has value of one and all
other samples have a value of zero. It is sometimes also referred to
as unit impulse since the sample at zero is one. When we say a
system's impulse response (denoted by) is h[n], we're saying "this is
how the system responds when the input is δ[n]." This gives us a
standard reference point for comparing systems. A decomposed signal is
just a scaled and shifted delta function. Refer to the above example.
Component 1 which is 5 is a delta function scaled to 5 and shifted by
zero. Component 2 is delta function scaled to 3 and shifted by one.
This can be represented mathematically as:
x1[n] = 5 * δ[n-0] = {5, 0, 0, 0}
x2[n] = 3 * δ[n-1] = {0, 3, 0, 0}
x[n] = x[0]·δ[n] + x[1]·δ[n-1] + x[2]·δ[n-2] + ... +
x[N-1]·δ[n-(N-1)]
This is written mathematically as
where:
- x[n] is the complete discrete signal
- x[k] is the amplitude of the kth sample
- δ[n-k] is the unit impulse (delta) function shifted by k positions
- N is the total number of samples in the signal
Convolution
Let's summarise what we have discovered so far. First, the input
signal is decomposed into a set of impulses which are nothing but
scaled and shifted delta functions. Second, each of these scaled and
shifted impulses are put through the system which results in a
corresponding scaled and shifted version of the impulse response.
Third, the overall output can be found by adding these scaled and
shifted impulse responses. This means we know everything about the
system.
Ok but what exactly is this system and what are we trying to achieve
with this system? In the context of audio processing a system refers
to any process that transforms an input audio signal into an output
signal so these modules need to take in audio signals and do some
processing to give us the desired output. A filter selectively
attenuates or boosts certain frequencies, reverb simulates an acoustic
environment, etc. These modules are the LTI systems we have been
talking about so far. While designing such modules we need to adhere
to the LTI principles else we won't be able to achieve the desired
results. The power of LTI systems lie in their predictability and
mathematical elegance. We can fully understand the behaviour of an LTI
system through its impulse response which allows us to apply that same
transformation consistently to any input signal through convolution.
This approach is the foundation of audio effects from reverbs to
equalisers. Without the framework of LTI the elegant simplicity of
convolution would fail to produce consistent, predictable results
audio engineers and musicians rely on.
You cannot combine two signals by adding or multiplying them. I mean
yes you can add or multiply signals together but the output you get
from such an operation might not be what you are looking for. For eg.
consider an audio processor module which provides a reverb effect to
the input signal. If you just add the input signals with the reverb
module's impulse response you might just get a louder signal at the
output. Or, if you just multiply the input signal with the module's
impulse response you might change the amplitude of the signal but it
won't have the reverb echoes. To actually create the reverb effect
with its characteristic echoes and decay, you need to convolve the
input signal with the impulse response and that's where convolution
comes in. Convolution is a mathematical operation just like
multiplication and addition. Convolution takes two signals and
produces a third signal but the process works completely different
than let's say the addition of two numbers.